FrostyDesign
自分用にさまざまなものを作るページです
robo-one 28th予選1位 & zynq制御コントローラ
- 2016/02/21 (Sun)
- 未選択 |
- CM(0) |
- Edit |
- ▲Top
2/13にrobo-one 28thの予選が開催され、記録更新して1位になりました。
今回からzynqを使った新しい制御コントローラになりました。
&バッテリーをLiHVに変更しました。
下記は予選の動画です。
4.5m走で記録は3.79秒でした。
4.5mを23歩で完走しました。計算上の実走行時間は3.68秒で
若干フライング気味でスタートして、計測装置側の反応遅れがあるので3.79秒という記録になったようです。
以前より加速度が20%程度、最高速度が3%程度上がってます。
下記が新しいzynqの制御コントローラです。
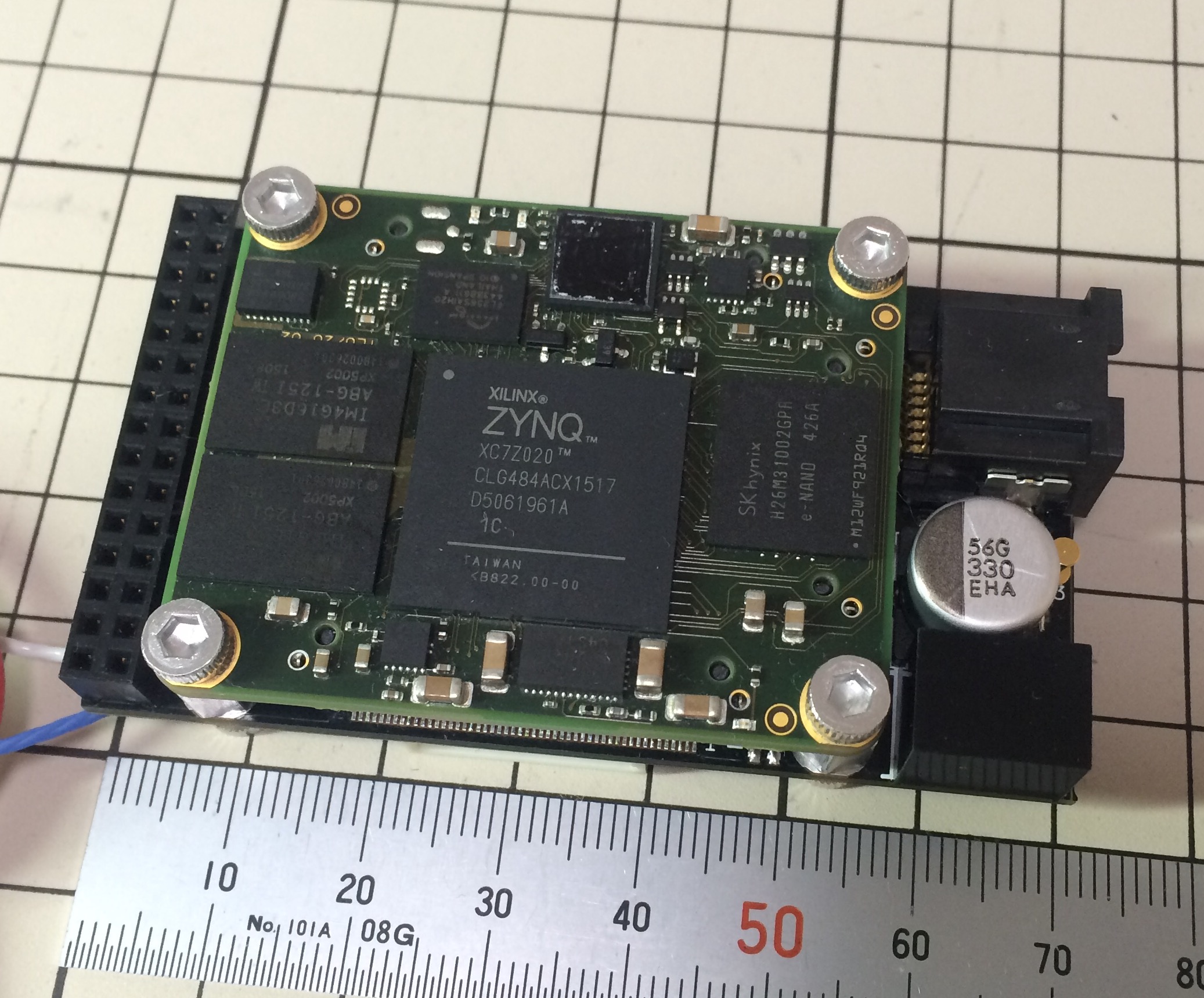
zynqはxilinx製で、CPUとFPGAが同一チップに入ったものです。
ドイツのTrenz Electornic社のTE0720というzynqのモジュールを使っています。
ARM Cortex-A9 dual-core 667MHz
1GByteDRAM,32MB Flash memory,1GbE
自作のIFボードにて下記IFを実装しています。
ICS 1.25Mbps x 6ch
RS485(kondo B3Mシリーズサーボ対応)3Mbps x 5ch
TTLレベル UART x 3ch
SPI(PS2コントローラ用)x 1ch
電源は9~24V対応で
大きさは40mm x 71mmです。
今回はICS 1.25Mbps x 6chを使って1ms周期で制御しています。
このボードの性能を使い切るにはまだだいぶかかりそうですが、
制御周期が上がっただけで応答が良くなったのは体感できますね。
下記は新しいバッテリーです。
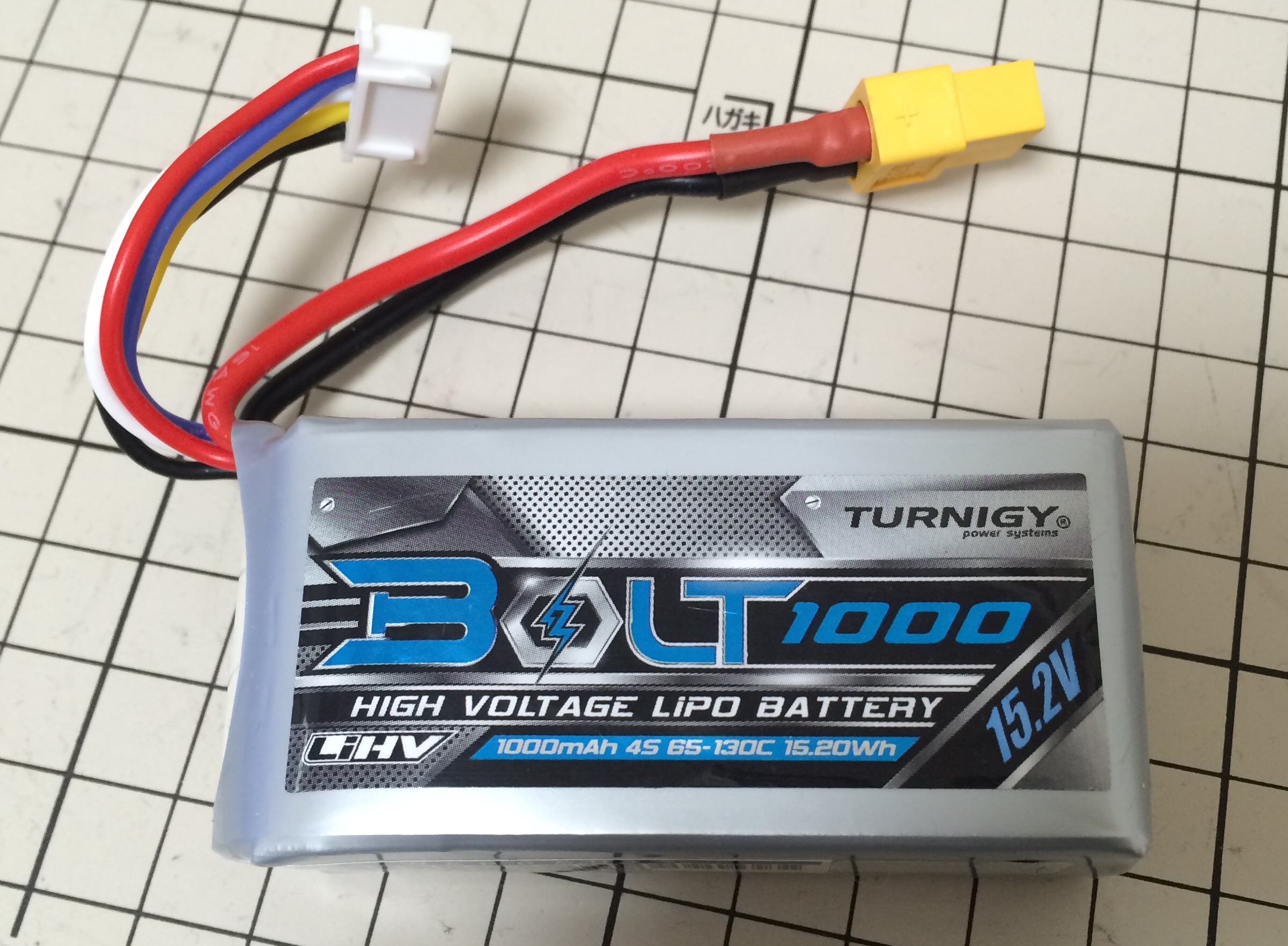
hobbykingのTurnigy Bolt 1000mAh 4S 15.2V 65~130C High Voltage Lipoly Pack (LiHV)
ハイボルテージと言っても仕様上1セルあたり0.1v高いだけで、
充電完了電圧でも0.15v高いだけなので、電圧3.5%アップです。
充電電圧が異なるため、充電器から買い直しになってしまうのですが、
バッテリーチェッカーがハイボルテージ対応のものがまだ無くて
非常に不便なので、まだお勧めはできません。
が、3.5%でもまあ違うのは体感できました。
あ、そういえば前回のrobo-one 27thも予選1位だったのにブログ書いてないや。
まあ、その前に完走したときと同じ仕様だったので良いかな。
今回からzynqを使った新しい制御コントローラになりました。
&バッテリーをLiHVに変更しました。
下記は予選の動画です。
4.5m走で記録は3.79秒でした。
4.5mを23歩で完走しました。計算上の実走行時間は3.68秒で
若干フライング気味でスタートして、計測装置側の反応遅れがあるので3.79秒という記録になったようです。
以前より加速度が20%程度、最高速度が3%程度上がってます。
下記が新しいzynqの制御コントローラです。
zynqはxilinx製で、CPUとFPGAが同一チップに入ったものです。
ドイツのTrenz Electornic社のTE0720というzynqのモジュールを使っています。
ARM Cortex-A9 dual-core 667MHz
1GByteDRAM,32MB Flash memory,1GbE
自作のIFボードにて下記IFを実装しています。
ICS 1.25Mbps x 6ch
RS485(kondo B3Mシリーズサーボ対応)3Mbps x 5ch
TTLレベル UART x 3ch
SPI(PS2コントローラ用)x 1ch
電源は9~24V対応で
大きさは40mm x 71mmです。
今回はICS 1.25Mbps x 6chを使って1ms周期で制御しています。
このボードの性能を使い切るにはまだだいぶかかりそうですが、
制御周期が上がっただけで応答が良くなったのは体感できますね。
下記は新しいバッテリーです。
hobbykingのTurnigy Bolt 1000mAh 4S 15.2V 65~130C High Voltage Lipoly Pack (LiHV)
ハイボルテージと言っても仕様上1セルあたり0.1v高いだけで、
充電完了電圧でも0.15v高いだけなので、電圧3.5%アップです。
充電電圧が異なるため、充電器から買い直しになってしまうのですが、
バッテリーチェッカーがハイボルテージ対応のものがまだ無くて
非常に不便なので、まだお勧めはできません。
が、3.5%でもまあ違うのは体感できました。
あ、そういえば前回のrobo-one 27thも予選1位だったのにブログ書いてないや。
まあ、その前に完走したときと同じ仕様だったので良いかな。
PR
カレンダー
カテゴリー
プロフィール
最新記事
(06/29)
(05/12)
(05/02)
(02/21)
(07/08)
最新CM
[06/28 Braitaereks]
[08/29 l8xc6xc236]
[06/29 MichaelGek]
[06/18 Michaelted]
[06/14 GeorgeaccoG]
この記事へのコメント