11章にて私のロボットについて執筆しました。

表紙にも載っています。
本自体はROBO-ONEに参加するためにロボットを自作したい人に向けた情報が
まとめられています。といっても、この本だけを読めばいちから作れるという
わけではありません。いろいろ情報不足な部分もありますし、そもそも、
二足歩行ロボットを自作するとなると様々な知識が必要ですので1冊読めばOK
というわけにはいきません。ですがとっかかりの一冊にはなると思います。
また後半にはロボット制作者4人の著者がそれぞれのロボットについて、
執筆しています。ロボットを作るうえでの考え方だったり、ノウハウ的Tips
だったり、製作者それぞれの切り口で(皆さん自由に(^^;;)書いています。
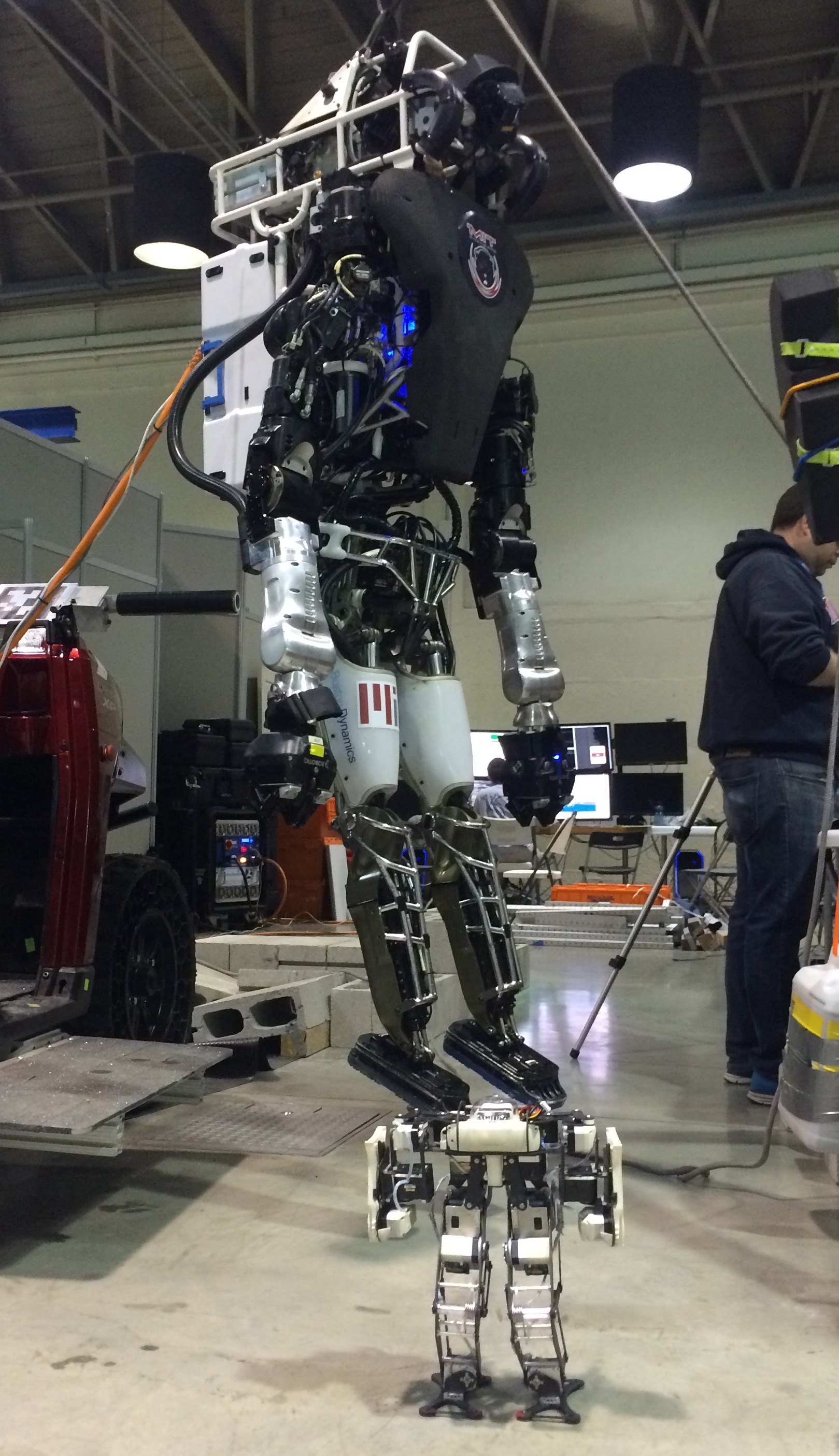
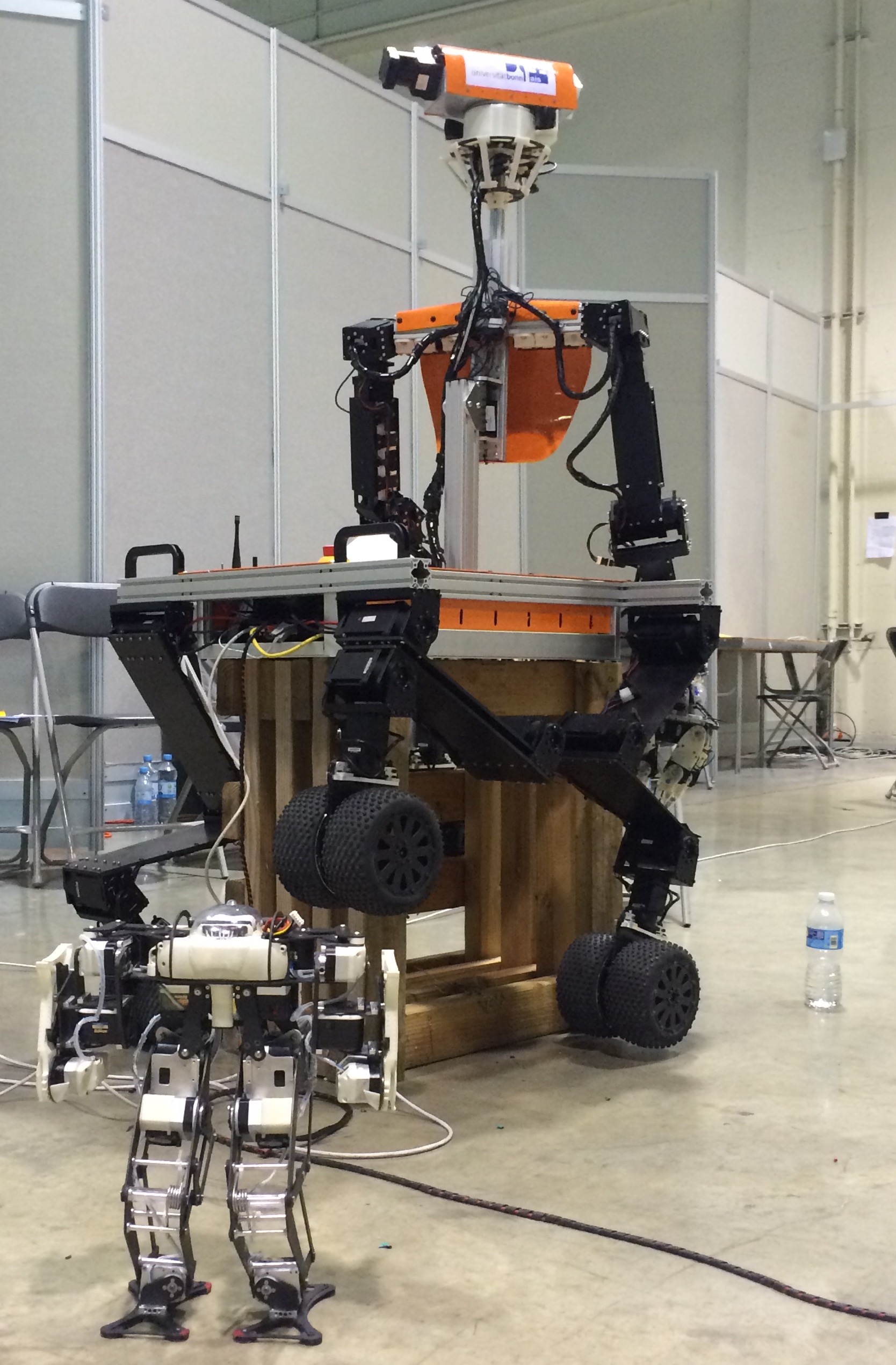
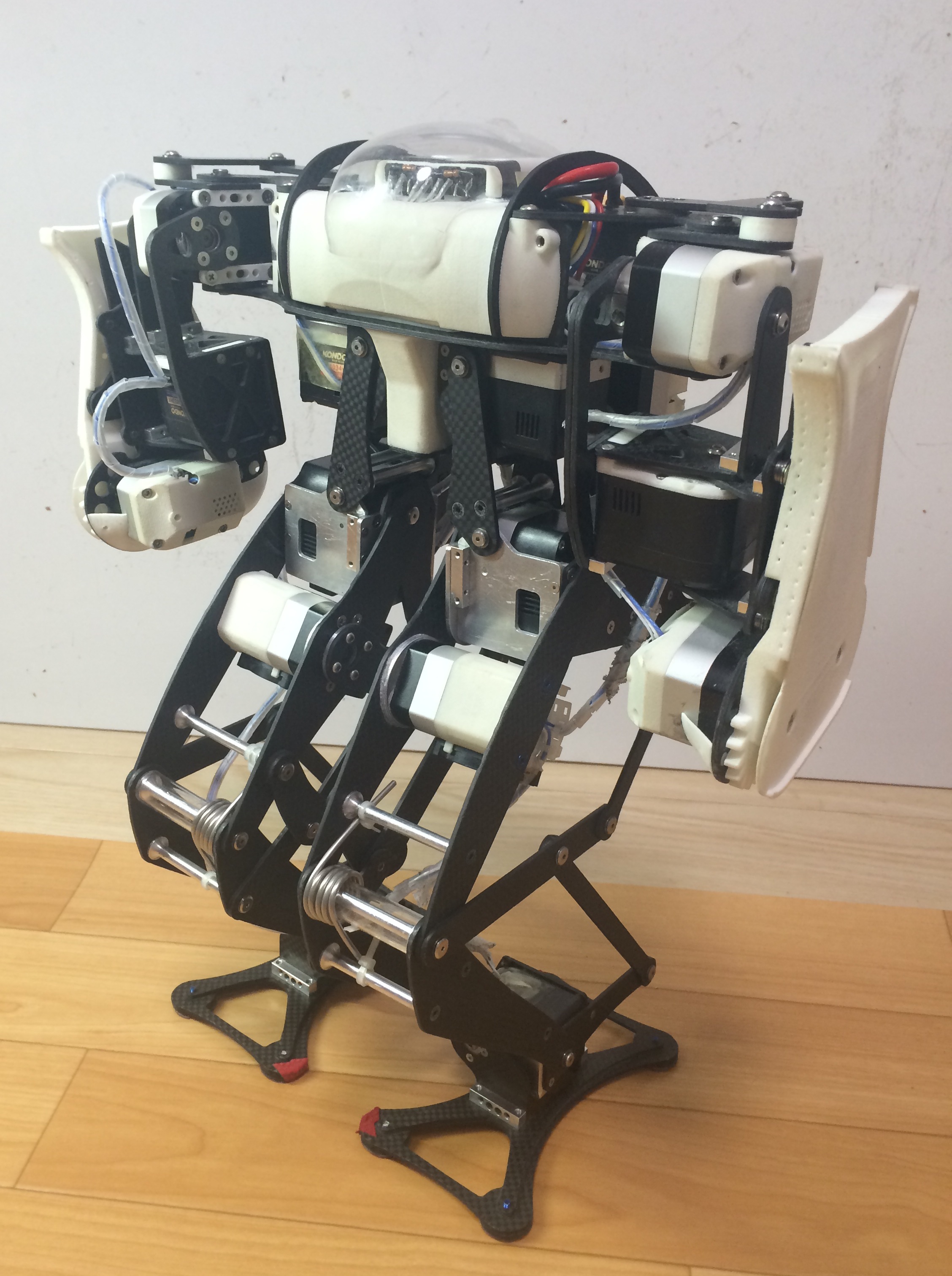
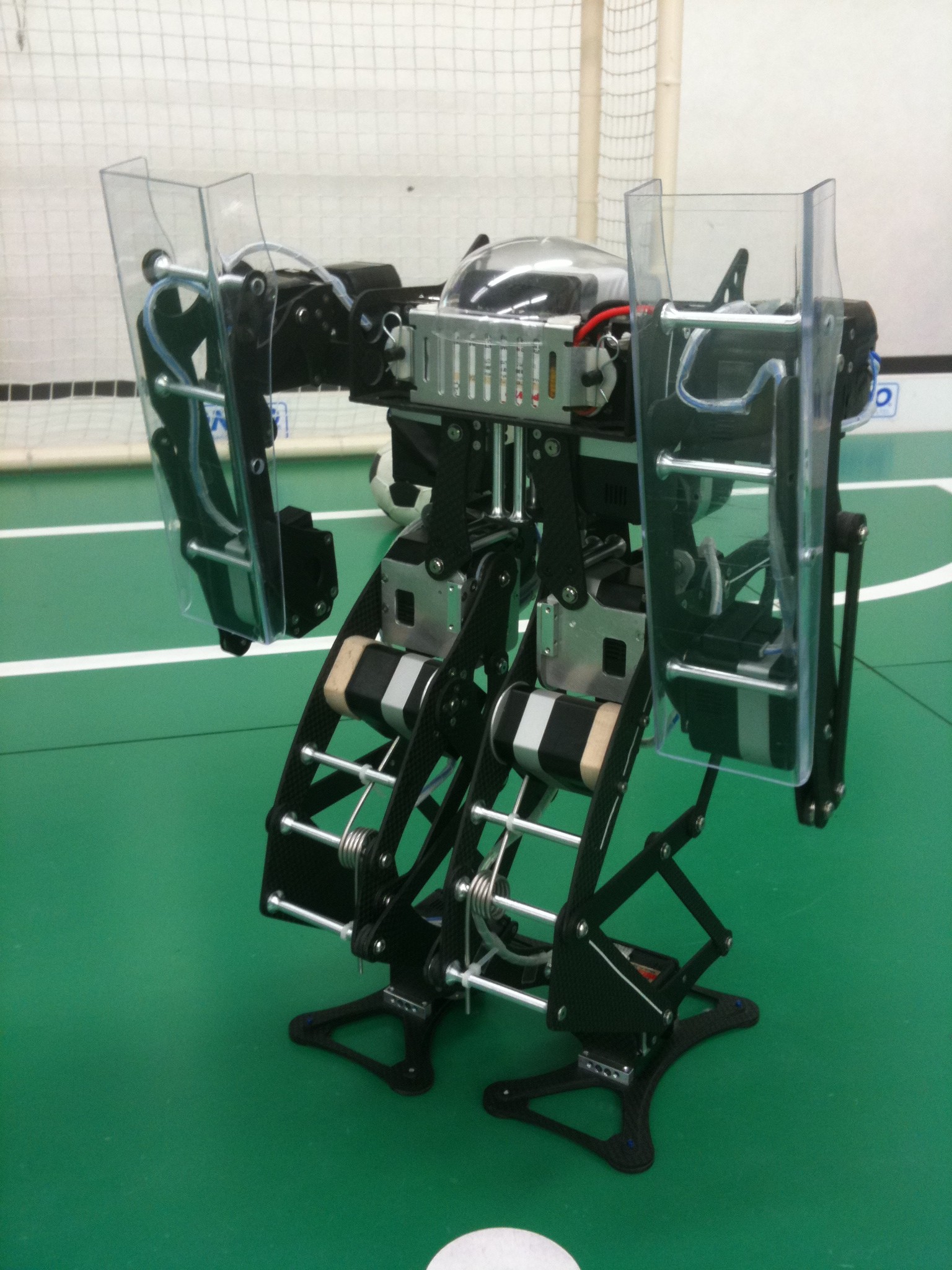
そのうちの一人として、11章ではFrostyについて書いています。
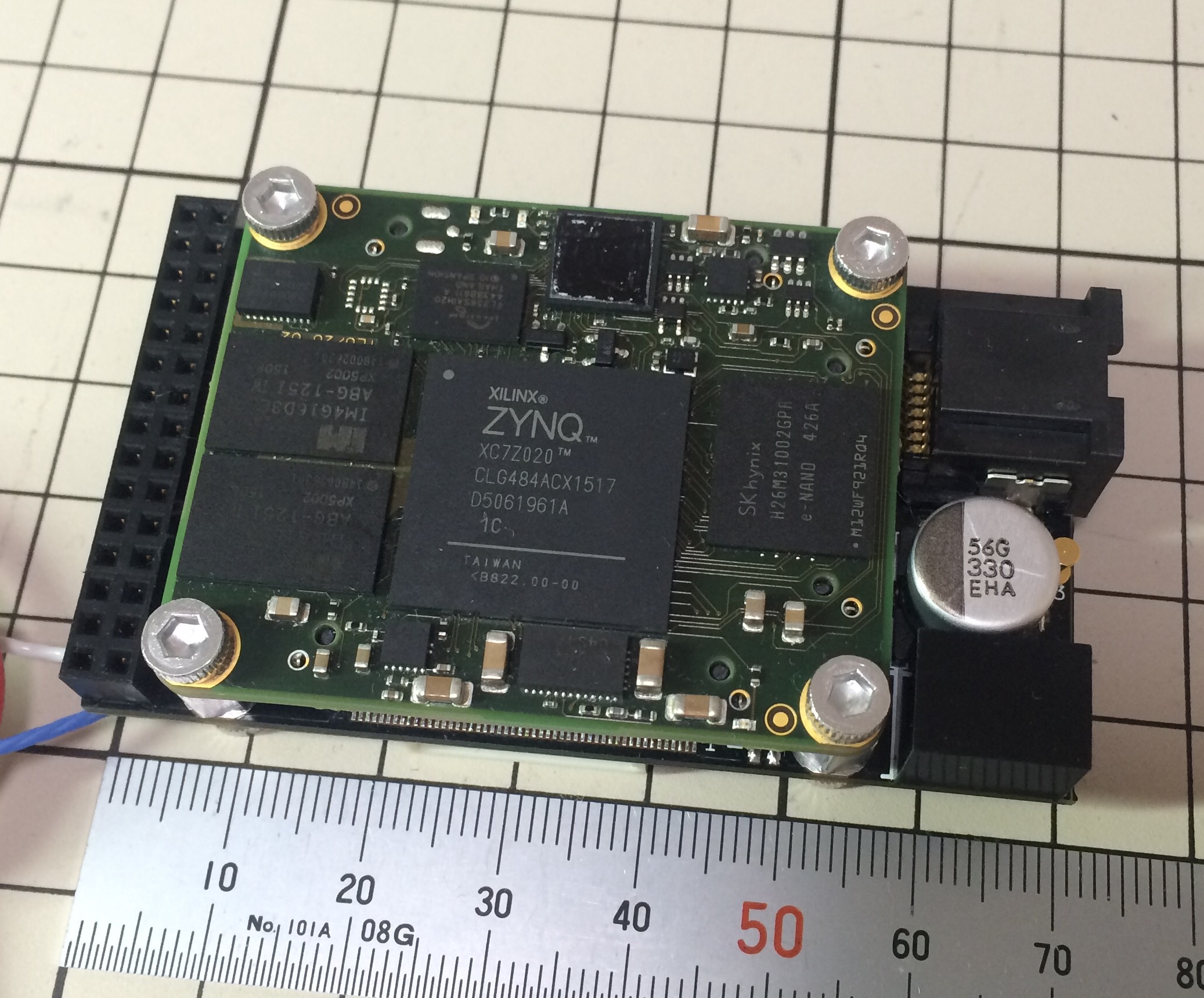
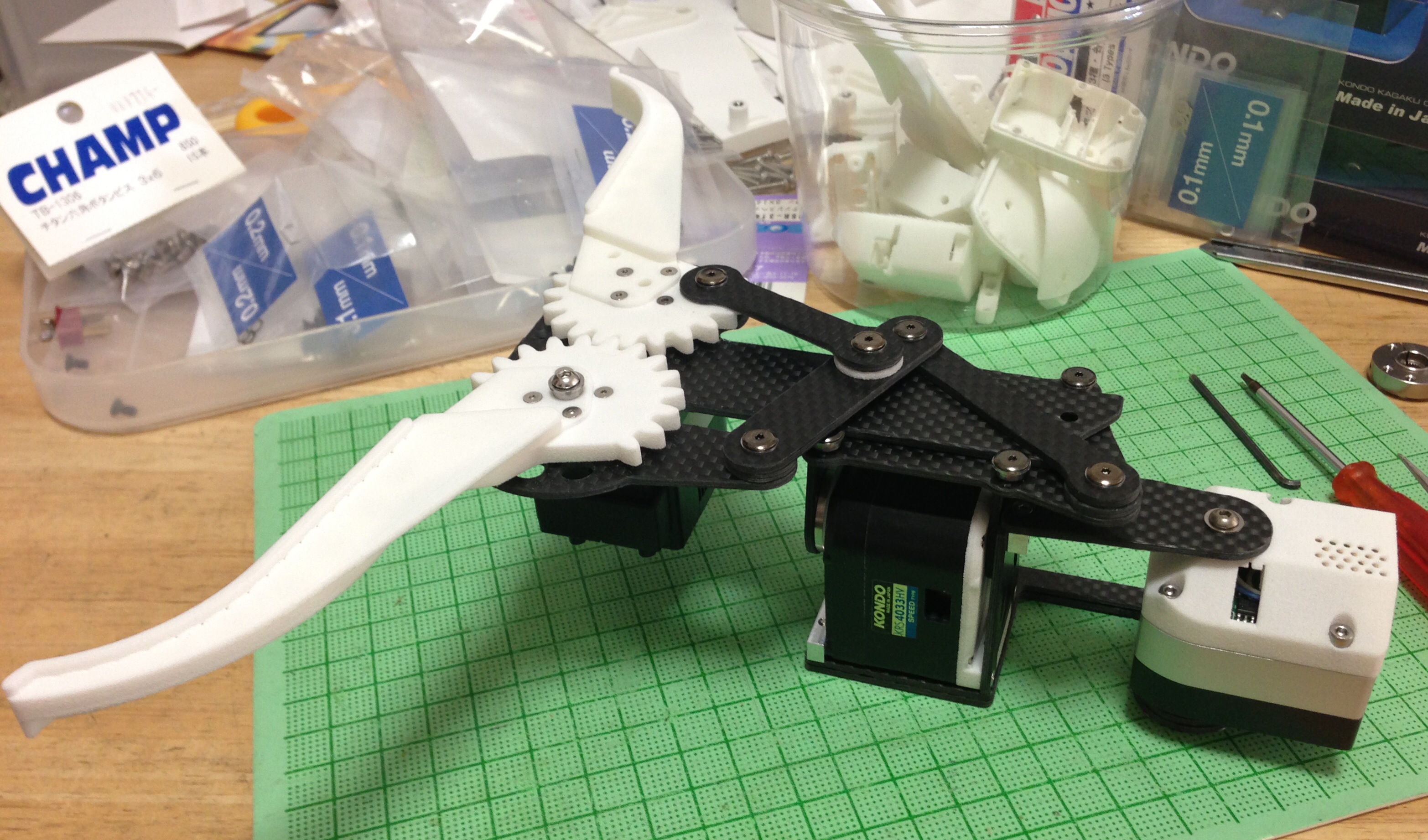
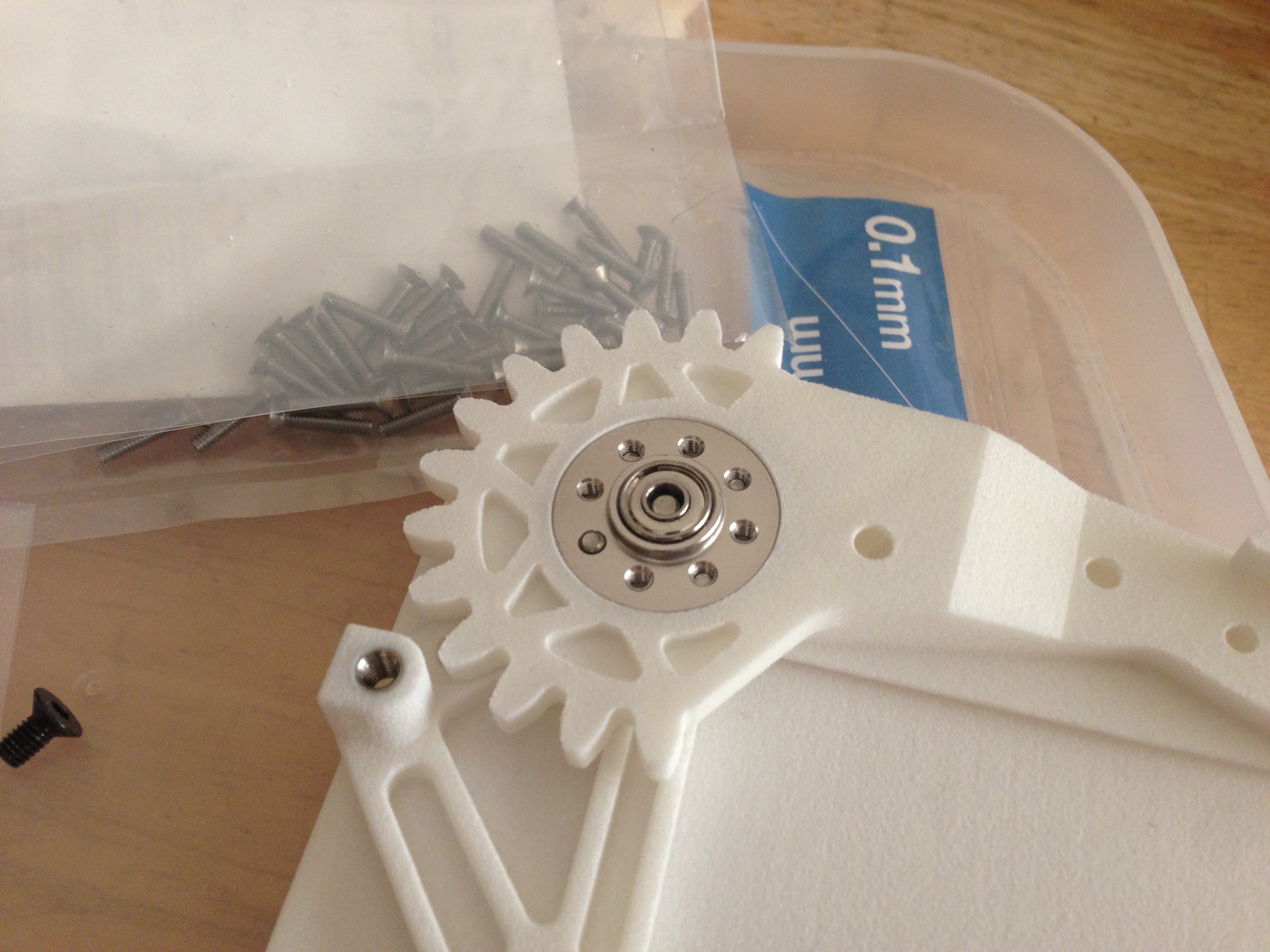
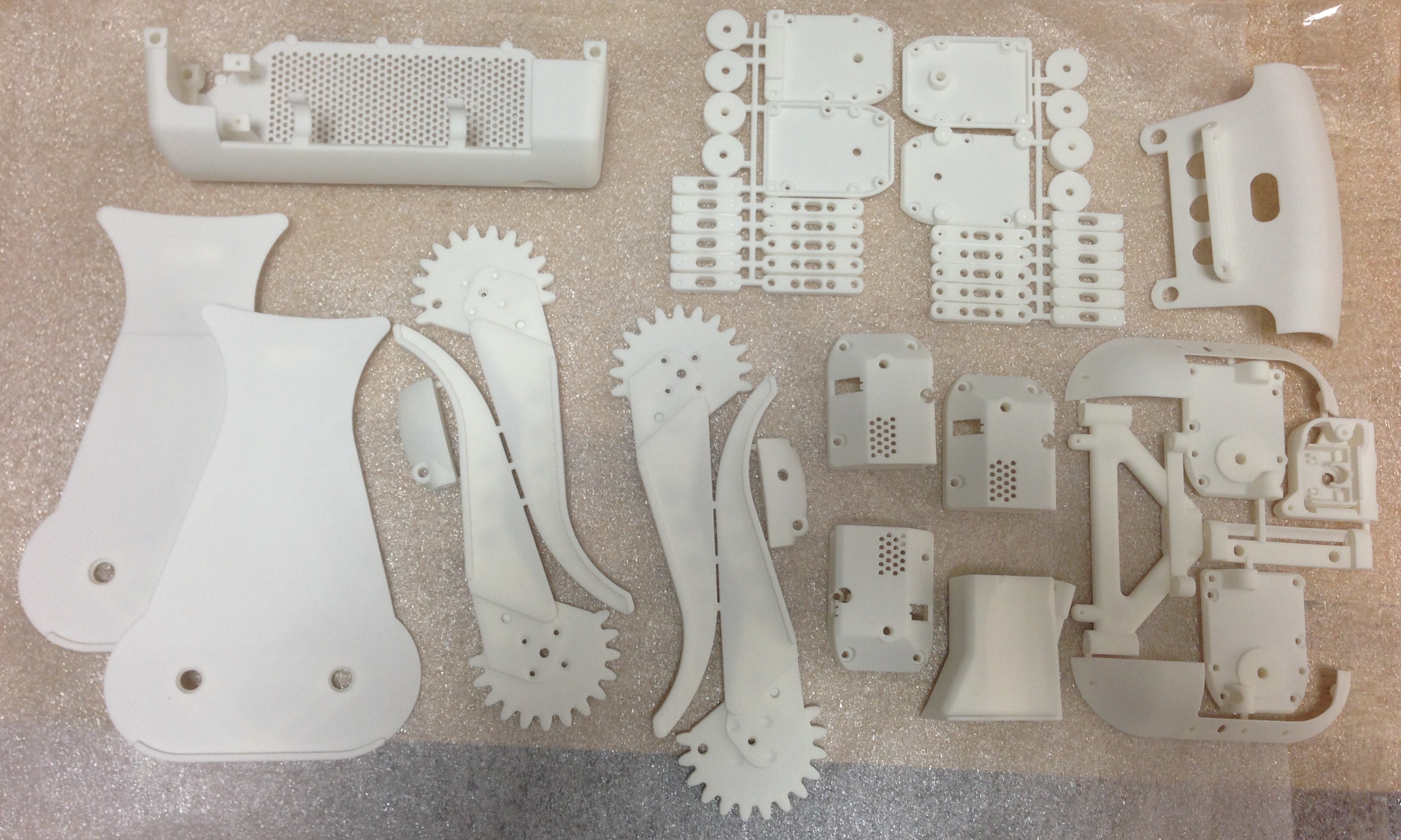
足のリンク機構の構造や設計思想などの解説、FPGAを使った制御アーキテクチャの
紹介、サーボの改造方法等、実装上のノウハウ集等になっています。
この本の情報だけでFrostyと同等のロボットを作るのは難しいかとに思いますが、
部分的にでも参考になればと思います。
半分ぐらいはこのブログに書いている内容ですが、ひと通りまとまった形で
読むことができるようになっています。
Amazonにて購入の際はこちらのリンク経由で購入していただけると、
少ない原稿料の足しになるので私が喜びます。
]]>