FrostyDesign
自分用にさまざまなものを作るページです
カテゴリー「未選択」の記事一覧
- 2024.04.20
[PR]
- 2012.05.27
ねじりバネの巻き方
- 2012.04.01
FrostyCoreArchitecture
- 2012.01.15
走行動画
- 2011.09.17
続・コントローラボード
- 2011.03.27
新しい足のリンク構造
ねじりバネの巻き方
- 2012/05/27 (Sun)
- 未選択 |
- CM(1) |
- Edit |
- ▲Top
市販のバネを購入しようとしても、適切な強さのバネを売っているわけではないので、
自作しています。

こんな感じの治具を作ります。

ネジで材料をしっかり固定します。

巻きます。

反対巻きの場合(右利きだとこっちが巻きやすいです。)
終わり。
と書くと簡単すぎですが、実際適当な性能でよければこれで十分ですし、
左右の強さがだいたいあってさえいれば効果は得られます。
まじめに設計するばあい、まずバネの設計。
東海バネさんのページで勉強。
http://www.tokaibane.com/tech/index.html
くじけそうな場合は、東海バネさん提供のツールに頼る。そのまま発注しても良い(^^;
http://www.tokaiweb.net/nejiribanet/
設計上のポイント
バネ鋼は東急ハンズで購入しました。ピアノ線とステンレスバネ線がありますが好みで。
バネとしての許容応力はピアノ線のほうが良いし安いです。
私は極力メンテナンスを避けたいのでステンレスにしています。
売っている直径の選択肢が少ないので、事前にサイズを調べてから計算しています。
この治具だと巻いた後の正確な直径は実際に巻いてみないと分からないので
仮計算して、太さを決めて、実際に巻いて直径を測ってから再度計算しています。
許容応力値を推奨値内にしないと疲労破断します。実際折れたことがあります。
が、軽量化のため高めにしてます、寿命予測は困難なのでマネはお勧めしません。
まずは許容応力内の設計をお勧めします。
どれくらいの強さのバネにするかはコンセプトにもよりますがFrostyの場合
ジャンプするために最適化しているわけではありません。
主に立っているときに自重をキャンセルし、低消費電力化とサーボの発熱を抑えるのが目的です。
ですので自重により発生するトルクの何割をキャンセルするかという設計です。
ヒザの角度によって負荷も変わるので、変動を抑えるような設計にしています。
また、サーボのトルクだけで足を縮められるようにする必要があるので
バネを強くするにも限度があります。縮める場合の計算も必要です。
計算の際は最大トルクで縮められるかではなく、縮める速度に配慮して決めています。
設計ができたらバネを巻きます。
一番最初の曲げ始めが形がゆがみやすいので、しっかりねじ止めしてから
引っ張りながら曲げていきます。
巻きすぎた場合戻して調整することはできません。
潔く捨てて、新しい材料で巻きなおします。
多少ゆがんでも材料の総長さと角度があっていれば大体同じ性能になるので由としてます。
左右で巻き方向を変えてますが、利き手があるのでやりにくい割には性能上の違いは分からず
見た目が左右対称にできるだけな気がします。
2012/8/2追記
本ブログを見てチャレンジして苦労している人もいるようなのでもう少し。
上記の方法でキレイに巻けるようになるには何回か練習が必要です。
最初に巻いてうまく行かないとくじけそうになるかも知れませんが、
4回ぐらい失敗するとある程度巻けるようになって、その後4つぐらい作って、
形状の近い2つを選別して使うという感じでした。
200円ぐらいのピアノ線で数本捨ててもまあ、その程度の価格なので、
冶具に凝るより、練習で腕を磨くほうが早いかなと思ってます。
とはいえ、Frostyに使っているぐらいの太さになるとかなりの硬くて
手が痛くなるぐらいです。最初にネジで固定するときに、素手で引っ張っても
取れないぐらいがっちり止めて、強く引っ張りながら巻いていく感じです。
自作しています。
こんな感じの治具を作ります。
ネジで材料をしっかり固定します。
巻きます。
反対巻きの場合(右利きだとこっちが巻きやすいです。)
終わり。
と書くと簡単すぎですが、実際適当な性能でよければこれで十分ですし、
左右の強さがだいたいあってさえいれば効果は得られます。
まじめに設計するばあい、まずバネの設計。
東海バネさんのページで勉強。
http://www.tokaibane.com/tech/index.html
くじけそうな場合は、東海バネさん提供のツールに頼る。そのまま発注しても良い(^^;
http://www.tokaiweb.net/nejiribanet/
設計上のポイント
バネ鋼は東急ハンズで購入しました。ピアノ線とステンレスバネ線がありますが好みで。
バネとしての許容応力はピアノ線のほうが良いし安いです。
私は極力メンテナンスを避けたいのでステンレスにしています。
売っている直径の選択肢が少ないので、事前にサイズを調べてから計算しています。
この治具だと巻いた後の正確な直径は実際に巻いてみないと分からないので
仮計算して、太さを決めて、実際に巻いて直径を測ってから再度計算しています。
許容応力値を推奨値内にしないと疲労破断します。実際折れたことがあります。
が、軽量化のため高めにしてます、寿命予測は困難なのでマネはお勧めしません。
まずは許容応力内の設計をお勧めします。
どれくらいの強さのバネにするかはコンセプトにもよりますがFrostyの場合
ジャンプするために最適化しているわけではありません。
主に立っているときに自重をキャンセルし、低消費電力化とサーボの発熱を抑えるのが目的です。
ですので自重により発生するトルクの何割をキャンセルするかという設計です。
ヒザの角度によって負荷も変わるので、変動を抑えるような設計にしています。
また、サーボのトルクだけで足を縮められるようにする必要があるので
バネを強くするにも限度があります。縮める場合の計算も必要です。
計算の際は最大トルクで縮められるかではなく、縮める速度に配慮して決めています。
設計ができたらバネを巻きます。
一番最初の曲げ始めが形がゆがみやすいので、しっかりねじ止めしてから
引っ張りながら曲げていきます。
巻きすぎた場合戻して調整することはできません。
潔く捨てて、新しい材料で巻きなおします。
多少ゆがんでも材料の総長さと角度があっていれば大体同じ性能になるので由としてます。
左右で巻き方向を変えてますが、利き手があるのでやりにくい割には性能上の違いは分からず
見た目が左右対称にできるだけな気がします。
2012/8/2追記
本ブログを見てチャレンジして苦労している人もいるようなのでもう少し。
上記の方法でキレイに巻けるようになるには何回か練習が必要です。
最初に巻いてうまく行かないとくじけそうになるかも知れませんが、
4回ぐらい失敗するとある程度巻けるようになって、その後4つぐらい作って、
形状の近い2つを選別して使うという感じでした。
200円ぐらいのピアノ線で数本捨ててもまあ、その程度の価格なので、
冶具に凝るより、練習で腕を磨くほうが早いかなと思ってます。
とはいえ、Frostyに使っているぐらいの太さになるとかなりの硬くて
手が痛くなるぐらいです。最初にネジで固定するときに、素手で引っ張っても
取れないぐらいがっちり止めて、強く引っ張りながら巻いていく感じです。
PR
FrostyCoreArchitecture
- 2012/04/01 (Sun)
- 未選択 |
- CM(0) |
- Edit |
- ▲Top
制御系のアーキテクチャを書いてみたので公開。
まずは制御系ハードウェアのアーキテクチャ
以前に写真で説明しましたが、CPUはSH7145 50MHz 。
このクラスのマイコンボードとしては1MB DRAMとメモリ多めなのが選定ポイントの1つです。
FPGAボードとは16bit 50MHzのバスで接続。
FPGA内にICS3.0仕様のプロトコルモジュールを6ch、
PSコントローラのプロトコル処理もFPGA化しています。
下記は、シーケンス図です。
通常はまずソフトウェアブロック図を示すところですが、
このアーキテクチャでは
純粋なソフトウェアはメインスレッドのみで
通常、スレッド分けて実装する通信処理系をすべてFPGAで実装しています。
メインスレッドからFPGAの通信はレジスタ経由なのでほぼメモリアクセスと同等で読み書きでき、
レジスタマップがAPIという感じです。
メインスレッド1つに通信系のスレッドが7つという感じでしょうか。
ADコンバータもコントローラ側で複数chスキャンしてるので5msに一回まとめてレジスタ読んでます。
メインスレッドは5ms毎のタイマー割り込みでループしていて、これがシステム制御間隔になっており、
センサ情報取得、PSコントローラ受信、サーボ制御、全て5ms周期になっています。
まずは制御系ハードウェアのアーキテクチャ
以前に写真で説明しましたが、CPUはSH7145 50MHz 。
このクラスのマイコンボードとしては1MB DRAMとメモリ多めなのが選定ポイントの1つです。
FPGAボードとは16bit 50MHzのバスで接続。
FPGA内にICS3.0仕様のプロトコルモジュールを6ch、
PSコントローラのプロトコル処理もFPGA化しています。
下記は、シーケンス図です。
通常はまずソフトウェアブロック図を示すところですが、
このアーキテクチャでは
純粋なソフトウェアはメインスレッドのみで
通常、スレッド分けて実装する通信処理系をすべてFPGAで実装しています。
メインスレッドからFPGAの通信はレジスタ経由なのでほぼメモリアクセスと同等で読み書きでき、
レジスタマップがAPIという感じです。
メインスレッド1つに通信系のスレッドが7つという感じでしょうか。
ADコンバータもコントローラ側で複数chスキャンしてるので5msに一回まとめてレジスタ読んでます。
メインスレッドは5ms毎のタイマー割り込みでループしていて、これがシステム制御間隔になっており、
センサ情報取得、PSコントローラ受信、サーボ制御、全て5ms周期になっています。
走行動画
まずは素の特性を良くしてからフィードバックと思っていましたが、改良したらジャイロによるフィードバック無しで最高速まで加速できるようになりました。
300fpsの映像です。一応ちゃんと浮いてます
こっちは加速後、減速して止まるまでの動画
300fpsの映像です。一応ちゃんと浮いてます
こっちは加速後、減速して止まるまでの動画
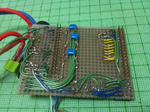
続・コントローラボード
コントローラの電源を変更した際にばらしたので写真とって見ました。
 電源ケーブル込みなこともありますが、
電源ケーブル込みなこともありますが、
ちょっと重い108.6g
コントローラボードは3段構成になっていて
 一番上は
一番上は
ベステク BTC080 SH7145Fマイコンボード
http://www.besttechnology.co.jp/modules/knowledge/?BTC080%20SH7145F マイコンボード
FPGAとクロック同期するためのクロックのラインがなかったので
CPUの足から取ってます。
 一番下は
一番下は
FPGAボード(ヒューマンデータ XCM-301-200)
http://www.hdl.co.jp/XCM-301/index.html
FPGAで
ICS3.5仕様シリアル通信モジュール6ch
プレステコントローラ通信モジュールを組んでます
ICS3.5仕様シリアル通信モジュール
はISC3.5といってもコマンドは3バイトのみ対応、ボーレートは115kbps固定としています。
(ICS2.0のサーボも使っているため)
FIFOバッファ付でCPUからは複数コマンドを連続書き込み可能で
FPGA側でタイムアウトエラー回避のため1ms間隔で送信します。
受信結果も複数コマンド分レジスタに蓄積し、エラー情報とセットで
連続して読み出せます。
CPU側では多重割り込みを使うことなく6ch×3サーボを5ms毎にタイマー割り込み1回で送受信しています。
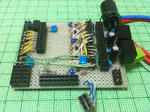
中間段は
電源、レベル変換、外部へのコネクタになっています。
電源はDCDCコンバータでRecom R-783.3-1.0
http://www.bellnix.co.jp/pdf/C_R-78.pdf
http://jp.rs-online.com/web/p/dc-dc-converters/6727120/
レベル変換は
サーボの制御信号が5Vの半二重なので方向付5v-3.3v変換で
TI SN74LVC1T45 です。
http://www.tij.co.jp/product/jp/sn74lvc1t45
ちょっとパスコンが多めなのはデバッグ中におまじないで
入れたためで、多分もっと少なくても大丈夫です。
#FPGAのソースコード提供するから
誰か基板起こして小型軽量化してくれないかな~。
ちょっと重い108.6g
コントローラボードは3段構成になっていて
ベステク BTC080 SH7145Fマイコンボード
http://www.besttechnology.co.jp/modules/knowledge/?BTC080%20SH7145F マイコンボード
FPGAとクロック同期するためのクロックのラインがなかったので
CPUの足から取ってます。
FPGAボード(ヒューマンデータ XCM-301-200)
http://www.hdl.co.jp/XCM-301/index.html
FPGAで
ICS3.5仕様シリアル通信モジュール6ch
プレステコントローラ通信モジュールを組んでます
ICS3.5仕様シリアル通信モジュール
はISC3.5といってもコマンドは3バイトのみ対応、ボーレートは115kbps固定としています。
(ICS2.0のサーボも使っているため)
FIFOバッファ付でCPUからは複数コマンドを連続書き込み可能で
FPGA側でタイムアウトエラー回避のため1ms間隔で送信します。
受信結果も複数コマンド分レジスタに蓄積し、エラー情報とセットで
連続して読み出せます。
CPU側では多重割り込みを使うことなく6ch×3サーボを5ms毎にタイマー割り込み1回で送受信しています。
中間段は
電源、レベル変換、外部へのコネクタになっています。
電源はDCDCコンバータでRecom R-783.3-1.0
http://www.bellnix.co.jp/pdf/C_R-78.pdf
http://jp.rs-online.com/web/p/dc-dc-converters/6727120/
レベル変換は
サーボの制御信号が5Vの半二重なので方向付5v-3.3v変換で
TI SN74LVC1T45 です。
http://www.tij.co.jp/product/jp/sn74lvc1t45
ちょっとパスコンが多めなのはデバッグ中におまじないで
入れたためで、多分もっと少なくても大丈夫です。
#FPGAのソースコード提供するから
誰か基板起こして小型軽量化してくれないかな~。
新しい足のリンク構造
新しい足のリンク構造です。
といっても前回のrobo-one 18thですでに更新していて、その公開です。
新しいといっても、基本コンセプトとしては前と同じで、その改良版です。
robo-oneのルールにあわせて足を長くしたことと、
バック宙をできる性能を維持しつつ、省電力化を図っています。
考え方としては、サーボのヒザの屈伸のレシオのカーブを変更し、
足を伸ばしきったときのレシオを下がり過ぎないようにし、その分、バネのプリテンションをあげて
立っているときのバネ加重を上げています。
また、以前は疑似直線リンクとヒザの伸縮のリンクは独立していましたが、
今回は途中で合成する構成にしています。
といっても前回のrobo-one 18thですでに更新していて、その公開です。
新しいといっても、基本コンセプトとしては前と同じで、その改良版です。
robo-oneのルールにあわせて足を長くしたことと、
バック宙をできる性能を維持しつつ、省電力化を図っています。
考え方としては、サーボのヒザの屈伸のレシオのカーブを変更し、
足を伸ばしきったときのレシオを下がり過ぎないようにし、その分、バネのプリテンションをあげて
立っているときのバネ加重を上げています。
また、以前は疑似直線リンクとヒザの伸縮のリンクは独立していましたが、
今回は途中で合成する構成にしています。
カレンダー
カテゴリー
プロフィール
最新記事
(06/29)
(05/12)
(05/02)
(02/21)
(07/08)
最新CM
[06/28 Braitaereks]
[08/29 l8xc6xc236]
[06/29 MichaelGek]
[06/18 Michaelted]
[06/14 GeorgeaccoG]